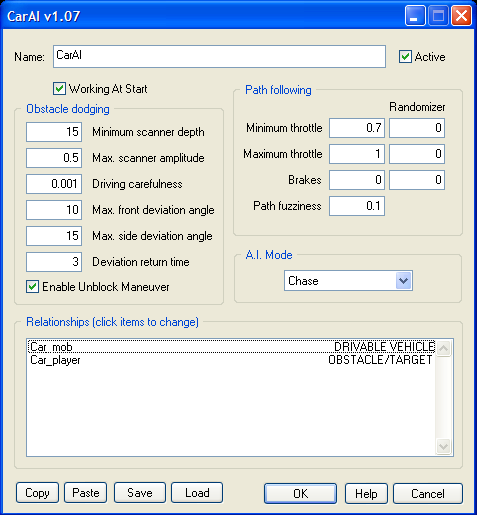
CarAI - переводиться примерно так: Виртуальный интелект(AI) машины. Используется чтобы указать объекту или объектам путь или объект за которым нужно следовать. Например может использоватся в гонках чтобы машина "тупо" ездила за игроком. Ну или катер, гонки на катерах же тоже бывают.=) Так же может использоваться вместе с объектом Path.
Итак приступим к изучению объекта: Стандартные кнопки Active - Активен Working At Start - Работает при старте
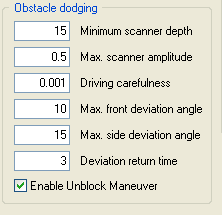
Заздел Obstacle dodging - Препятствие и уклонение: Minimum Scanner - растояние в метрах на котором может быть обнаружено препятствие. Max. scanner amplitude - как правило, макс. амплитуда обычно равна ширине авто / на 2. Установка силшком большого значения может привести к таму что автомобил будет реагировать на препятствия не стоящие на пути. Driving carefulness - чем больше значение тем быстрее водитель будет реагировать чтобы не столкнуться. Значение должно быть между 0 и 10. Max. front deviatiom angle - значение в градусх 0-180, будет определять насколько градусов отклониться следующее авто(тоесть то которое следует за кем то - ваш кэп) будет отклоняться от "идеального пути" чтобы избежать столкновения с любым объектом Max. side deviation angle - значение в градусх 0-180, будет определять насколько градусов отклониться следующее авто будет отклоняться от "идеального пути" чтобы избежать столкновения с автомобилем. Deviation return time - приблезительное время в секундах чтобы вернуться к "идеальному пути". Enable unblock - если опция включена то автомобиль будет пытаться освободить себя если застрял где нибудь.
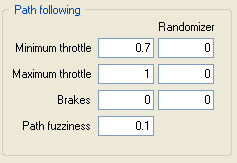
Раздел Path fallowing - Путь следования (уж такой перевод что я поделаю, хотя ни это же главное) Minimum throttle - чем ниже параметр тем сильнее автомобиль будет снижать скорость на поворотах, принимает значения от 0 до 1. Maximum throtle - принимает значения от -1 до 1. Breaks - тормоза, принимает значение от -1 до 1. Path fuzziness - если значение равно 0 то автомобиль будет двигаться относительно объекта Path. Randomzer - если выше нуля то параметры с лева такие как max. scaner amplituda и др.
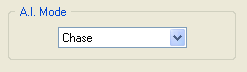
Раздел A.I. Mode: Avoid - объект старается избегать препятствия. Chase - следовать. Target - Старается избежать столкновения со всеми припятствиями но при этом держаться пути. Flee -
Раздел Relationships - переводится как что то вроде отношений. Вообщем как объекты относятся друг к другу:) IGNORE - ничего не делать. DRIVABLE VEHICLE - это объект который следует определённому пути или же движется за другим объектом. OBSTACLE/TARGET - этот объект является препятствием. PATH - это объект Path
|